Устройство и принцип работы самоблока ДАК
Дифференциал Автоматический Красикова предназначен для работы в трансмиссиях любых колёсных транспортных средств, на различных дорогах и бездорожье, во всех диапазонах скоростей и нагрузок, предусмотренных автопроизводителем.
Кинематическая схема ДАКа аналогична схеме классического дифференциала. ДАК — планетарный механизм, роль сателлитов в котором играют шариковые цепочки.
При равномерном движении, когда в ДАКе присутствует относительное равновесие сил, шариковая цепочка свободно перемещается вдоль каналов и как сателлит перераспределяет мощность (N=M*w) поровну между колесами. Автомобиль маневрирует, как со свободным дифференциалом. В отличие от дифференциала повышенного трения в этом режиме ДАК не создает сопротивления повороту.
При нарушении равенства сил (разные коэффициенты сопротивления на колесах, резкий разгон или торможение двигателем) шариковая цепочка нагружается, соотношение реакций сил в поворотном канале становится таким, что цепочка запирается. Дифференциал блокируется. Принцип блокировки подобен принципу самоторможения червячной передачи. Чем больше нагружаем, тем больше запирается ДАК.
ДАК реагирует не на разницу скоростей вращения колес, как другие самоблоки LSD, а на разницу моментов (нагрузок) на ведущих колесах и тяги двигателя.
Почему ДАК в одну сторону блокируется на 100%, а в обратную сторону на 90%?
Когда наклон винтовых канавок шнеков направлен в разные стороны по ходу движения автомобиля (рис. — вращение корпуса сверху вниз), нагружается ВСЯ шариковая цепочка, которая запирается в поворотном канале.
Когда наклон винтовых канавок шнеков направлен навстречу (рис. — вращение корпуса снизу вверх), в большей степени нагружается ЧАСТЬ цепочки, непосредственно контактирующая со шнеками. Другая часть цепочки, контактирующая с поворотными каналами, остается недогруженной. Составляющая сил, которая запирает шариковую цепочку в поворотном канале, недостаточна для блокирования дифференциала. Необходимо догрузить «слабое» колесо внешним воздействием. Слабым колесом назовем колесо, которое имеет меньший коэффициент сопротивления. Сильным колесом назовем колесо, которое имеет больший коэффициент сопротивления.
90% — цифра условная, она означает лишь то, что для создания условий блокирования необходима внешняя нагрузка на слабом колесе. Но при этом в заблокированном состоянии ДАК передает 100% нагрузки на сильное колесо. Это главное отличие ДАКа от дифференциалов повышенного трения, где момент на сильное колесо передается в той степени, в которой способны держать его пары трения.
ДАК — автоматическая система с обратной связью, его реакция на изменение дорожных условий мгновенна (реакция на изменение момента на колесе, а не скорость вращения). Автомобиль, оснащенный дифференциалом ДАК, приобретает курсовую устойчивость на скользкой поверхности.
Проходимость, устойчивость и вездеходность автомобиля существенно увеличивается.
Кинематическая схема блокировки дифференциала ДАК
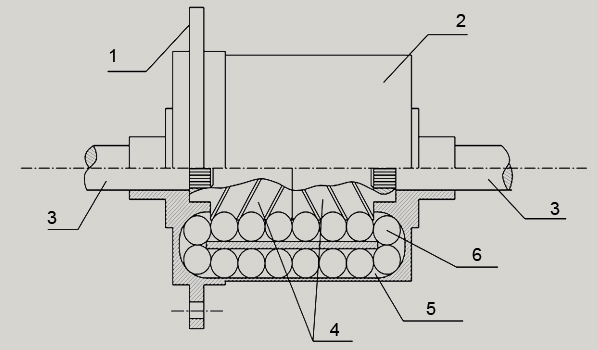
- Фланец шестерни главной передачи
- Корпус дифференциала
- Полуоси транспортного средства
- Полуосевые элементы
- Канал для прохождения шариков
- Тела качения — шарики
ДАК состоит из корпуса 2, с расположенными в центре двумя цилиндрическими полуосевыми элементами (шнеками) 4 торцами, соприкасающимися друг с другом. На поверхностях полуосевых элементов выполнены винтовые канавки, на одном шнеке правого, на другом левого направления вращения. В корпусе 2 продольно оси его вращения выполнены парные параллельные отверстия 5, близко расположенные друг к другу, равные диаметру применяемого шарика. Концы этих отверстий, соединенные между собой, образуют замкнутый канал, который заполняется шариками 6.
Замкнутая цепочка из шариков 6, если убрать полуосевые элементы 4, может перемещаться в канале 5 совершенно свободно, без помех.
Цепочка шариков в канале представляет собой шестерню овальной формы — сателлит, зубьями которой являются шарики.
Одна ветвь канала 5, расположенная ближе к оси вращения полуосевых элементов 4, вскрыта для погружения шариков в винтовые канавки полуосевых элементов. Замкнутая цепочка шариков соединяет оба полуосевых элемента в единую кинематическую схему.
Вращая корпус 2, мы передаём мощность через цепочку шариков 6 на винтовые канавки полуосевых элементов 4, а они, через полуоси 3, на колёса транспортного средства.
Если начнём поворачивать полуосевые элементы 4 через полуоси в противоположном направлении, то цепочка шариков 6 придёт в движение, разрешая полуосевым элементам 4 легко и свободно поворачиваться. В этом случае ДАК работает как обычный дифференциал.


